Así sube por las paredes y camina por el techo este mini-robot, el futuro de los motores
Creado por científicos de Harvard, podrán utilizarse para el mantenimiento de grandes maquinarias, tuberías, edificios o generadores

Cada vez que nos montamos en un avión confíamos en que la tecnología esté puesta a punto. Sin embargo, sus motores a reacción pueden tener hasta 25.000 piezas que tienen que ser desmontadas y revisadas por los técnicos, quienes pueden tardar más de un mes en acabar con esta tarea. Y no solo afecta a la aviación: la maquinaria enorme y compleja de las construcciones, generadores o instrumentos científicos requieren grandes inversiones de tiempo y dinero para mantener su tecnología a punto.
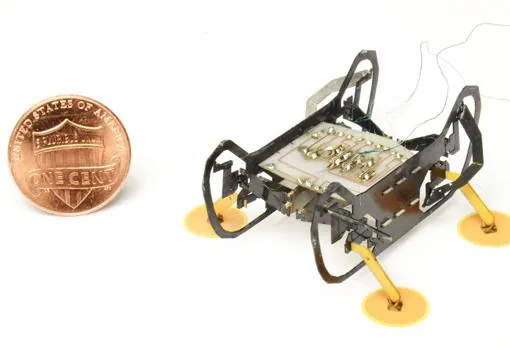
Para aliviar estas tareas -e incluso hacerlas más seguras-, investigadores del Instituto Wyss de Ingeniería de Harvard y de la Escuela de Ingeniería y Ciencias Aplicadas John A. Paulson (SEAS) han creado un micro-robot inspirándose en la naturaleza. Esta pequeña máquina, que pesa apenas un gramo y medio , tiene unas almohadillas electroadhesivas al final de cuatro «patas» articuladas en forma de «origami» , lo que le permite escalar paredes e incluso techos. Su nombre, HAMR-E (Micro-Robot Ambulatorio de Harvard con Electroadhesion), y se acaba de publicar en la revista «Science Robotics» .
«Ahora que estos robots pueden explorar en tres dimensiones en vez de solo moverse adelante y atrás, hay un mundo completamente nuevo en el que pueden desplazarse e involucrarse en otras tareas», afirma el primer autor del estudio, Sébastien de Rivaz , ex investigador en el Instituto Wyss y SEAS que ahora trabaja en Apple. «En el futuro podrían ser la clave para la inspección no invasiva de áreas de difícil acceso en grandes máquinas, ahorrando tiempo y dinero a las empresas, y haciendo que esos equipos sean más seguros», señala.
HAMR, los «hermanos» capaces de nadar
En realidad, se trata de un paso más en el desarrollo de nanorobots para el mantenimiento de motores o maquinaria pesada desarrollada por el laboratorio Harvard Microrobotics en colaboración con Rolls-Royce . En agosto ya presentaron unos pequeños dispositivos, llamados HAMR , del mismo peso con un tamaño de 10 milímetros de diámetro que podrán caminar sobre superficies planas de todo tipo, nadar y que incorporaban luces y cámaras para que el operario accediese a zonas difíciles sin tener que desmontar el aparato. Una tarea que antes duraba cinco horas pero que gracias a este «ejército» de robots se desarrolla en cinco minutos. Que estos pequeños pudieran andar en superficies verticales y boca abajo ha sido el siguiente reto del equipo.
Así es como nacieron los HAMR-E, muy similares a sus antecesores , pero con la capacidad de andar por superficies verticales, invertidas o curvas como las que encuentra en un motor a reacción. Así, puede caminar levantando y colocando sus «pies», unas almohadillas con un electrodo de cobre aislado con poliimida, que genera fuerzas electrostáticas entre las almohadillas y la superficie conductora debajo de éstas . Las almohadillas para los pies se pueden soltar y volver a acoplar fácilmente activando y desactivando el campo eléctrico, que funciona a un voltaje similar al requerido para mover las patas del robot, lo que requiere muy poca potencia adicional.
Unos tobillos de origami
Por otro lado, los investigadores también idearon unas nuevas articulaciones para que el tobillo de los HAMR-E pueda rotar en tres dimensiones mientras camina , lo que le permite mantener la orientación mientras escala. Las uniones se fabricaron con fibra de vidrio y poliimida en capas, y se doblaron formando una estructura parecida a un origami que permite que los tobillos giren libremente y se alineen pasivamente con el terreno a medida que HAMR-E sube.
Finalmente, los investigadores crearon un patrón especial para caminar para HAMR-E, ya que necesita tener tres almohadillas para los pies que toquen una superficie vertical o invertida en todo momento para evitar que se caiga o se deslice . Un pie se libera de la superficie, se balancea hacia adelante y se vuelve a unir al suelo mientras que los tres pies restantes permanecen estáticos en la superficie. Este proceso se repite para las otras tres patas para crear un ciclo completo de caminata, y se sincroniza con el patrón de cambio de campo eléctrico en cada pie. También es capaz de realizar giros de 180 grados en superficies horizontales .
Patas con detectores y capacidad para carga
El equipo continúa retocando los sistemas HAMR-E, y planea incorporar sensores en sus patas que pueden detectar y compensar las almohadillas desprendidas del pie, lo que ayudará a evitar que se caiga de las superficies verticales o invertidas. También buscarán capacidad de carga útil de HAMR-E , lo que abre la posibilidad de llevar una fuente de alimentación y otros componentes electrónicos y sensores para inspeccionar diversos entornos. El equipo también está explorando opciones para usar HAMR-E en superficies no conductoras. Por otro lado, los ingenieros también abren la posibilidad a que mini-dispositivos como estos se encuentren de manera permanente dentro de la maquinaria , para conocer el estado, mantener o arreglar los equipos en tiempo real.
«HAMR-E es el primer y más convincente paso para demostrar que los pequeños robots escaladores son posibles, y que podrían utilizarse en el futuro para explorar cualquier tipo de infraestructura, incluidos edificios, tuberías, motores, generadores y más», asevera el autor correspondiente Robert Wood , miembro de la Facultad Fundadora del Instituto Wyss, así como el Profesor de Ingeniería y Ciencias Aplicadas de Charles River en SEAS.
Esta funcionalidad es sólo para registrados
Iniciar sesión